The Caves of Mars
Dr. Penelope J. Boston; P.I.



Geology of Lavatubes: Instant caves from liquid rock.

Biology of Lavatubes: The Rock Eaters and other Extremophiles.

Extraterrestrial Caves: The ET Underground and the search for life.
ET LavatubesNIAC StudyThe Caves of Mars
NASA Institute for Advanced Concepts, (NIAC)
Download the Full Reports in Adobe Acrobat format: Phase IPhase II
 Natural subsurface cavities and subsurface constructs present the most mission effective habitat alternative for future human missions in the high-radiation environment of Mars. Additionally, lava tubes, other caves, cavities, and canyon overhangs are sites of intense scientific interest. They offer easier subsurface access for direct exploration and drilling, and may provide extractable minerals, gases, and ices. Expanding our NIAC Phase I feasibility assessment of a subsurface Mars mission architecture for the scientific exploration and human habitation of caves and subsurface facilities, we propose a two-part viability demonstration of selected technologies combined into a functioning system. This system can be integrated into both robotic precursors and human missions.
Natural subsurface cavities and subsurface constructs present the most mission effective habitat alternative for future human missions in the high-radiation environment of Mars. Additionally, lava tubes, other caves, cavities, and canyon overhangs are sites of intense scientific interest. They offer easier subsurface access for direct exploration and drilling, and may provide extractable minerals, gases, and ices. Expanding our NIAC Phase I feasibility assessment of a subsurface Mars mission architecture for the scientific exploration and human habitation of caves and subsurface facilities, we propose a two-part viability demonstration of selected technologies combined into a functioning system. This system can be integrated into both robotic precursors and human missions.
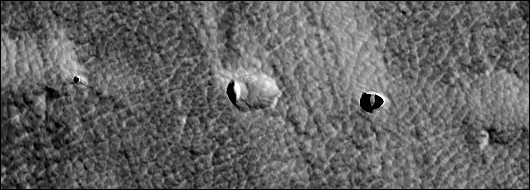
Part I (months 1-11) involves construction of an in-cave test habitat with associated life support and auxiliary systems for use with rodents and plants. This will culminate in an extended duration "Mouse Mission to Inner Space" in an Earth lava tube representative of those visible in recent MOC images of Mars. This will provide proof-of-concept for organism responses to system components and synergistic behavior. Additionally, it will lay the foundation for viability testing of non-human Earth organisms in situ on Mars - an indispensable precursor to human missions not currently recognized nor planned for within NASA.
Part II (months 12-23) expands on design, engineering, and scientific lessons learned during Part I to construct a human-scale inflatable in-cave habitat with associated life support and auxiliary systems. This will culminate in an extended duration "Speleonaut Mission to Inner Space" with a human crew or two living and performing scientific work in a pristine, biologically sensitive Earth cave representative of possible Martian subsurface life detection sites.
This project describes a revolutionary system comprising a merger of unique technologies that will enable future NASA missions by solving human survival and exploration problems in the hostile Martian environment.
Project Objectives:
 The primary objective of this feasibility demonstration is to show that relatively simple, easily-deployable subsurface habitats are constructible in caves, lavatubes, and other subsurface voids. Further, we intend to demonstrate that they are suitable to sustain small animals, plants, and ultimately humans in an otherwise hostile environment.
The primary objective of this feasibility demonstration is to show that relatively simple, easily-deployable subsurface habitats are constructible in caves, lavatubes, and other subsurface voids. Further, we intend to demonstrate that they are suitable to sustain small animals, plants, and ultimately humans in an otherwise hostile environment.
The secondary objective is to show that humans can do useful work and scientific exploration in a subsurface environment facing some of the constraints that they will meet in the Martian environment.
The third objective is to separate those features of a Mars subsurface mission that can be simulated in an Earth cave (e.g. Mars-derived breathing mixtures) from those that cannot (e.g. Martian gravity levels). Experience will enable mission planners to have some basis for deciding whether to pursue subsurface options for habitat and scientific targets. It will also clearly identify those aspects of subsurface Mars mission architectures that cannot be simulated on Earth and must be studied on the International Space Station or other platforms and missions.
The fourth objective is to demonstrate the feasibility of the individual system subcomponents that we identified as important and worthy of further development during Phase I of this project. These include: inflatable habitat modules; simple, standardized foam-in-place airlock units; Mars-derived breathing mixtures; node-to-node incave telecommunication, mapping, and telemetry network; inert gas pressurization of habitat caves; human functionality in the Mars cave environment; and coupling of photosynthetic oxygen production with bioluminescence for provision of light and habitat gas balance.